About Me 
I’m a robotics software engineer at DiDi Research America, shaping the future of L4 self-driving cars by building their behavior planning and decision-making systems.
Previously, I was a research assistant in the Electrical and Computer Engineering Department at the University of Virginia. I worked in the Autonomous Mobile Robots (AMR) Lab and the Link Lab under the supervision of Prof. Nicola Bezzo. Before coming to UVA, I was an exchange student for my senior year of undergraduate at UC Berkeley EECS. I received my B.S. degree in Automation at the Beijing Institute of Technology, Beijing, China.
My research focuses on adaptive motion and path planning for unmanned ground/aerial vehicles, transfer learning, and robotics system failure detection and recovery. My collaboration works extend into the areas of autonomous inspection, robotic swarms, cyber-physical systems (CPS) security, and Human-robot interaction (HRI). The robots listed here are some of the robots I worked with on a daily basis. Feel free to send me an email if you are interested in my work or have any questions for me.
Outside of academic pursuits, I’m an avid outdoor enthusiast, enjoying a wide variety of sports.
News
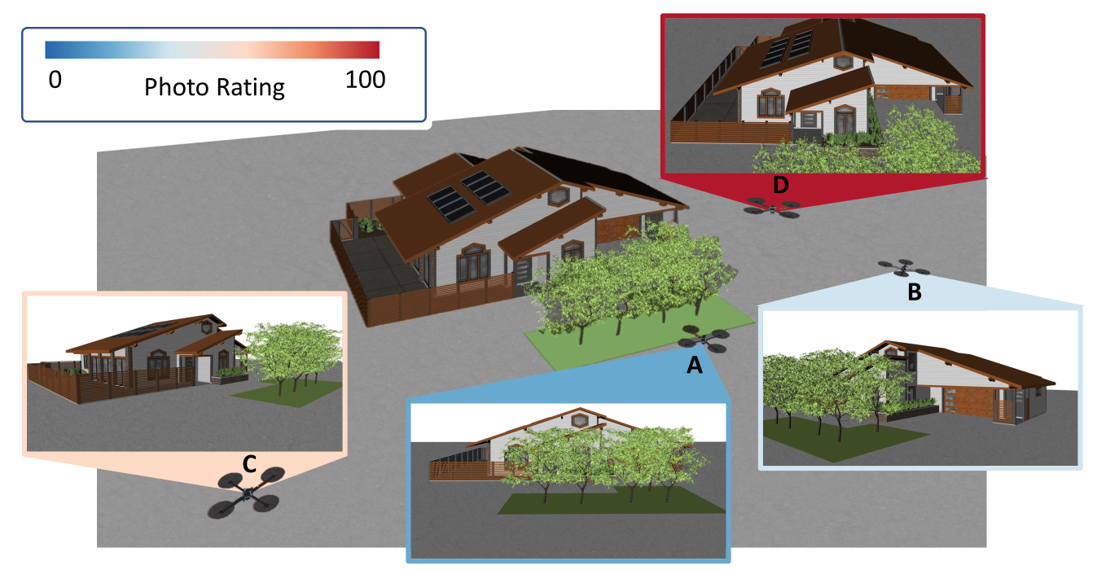
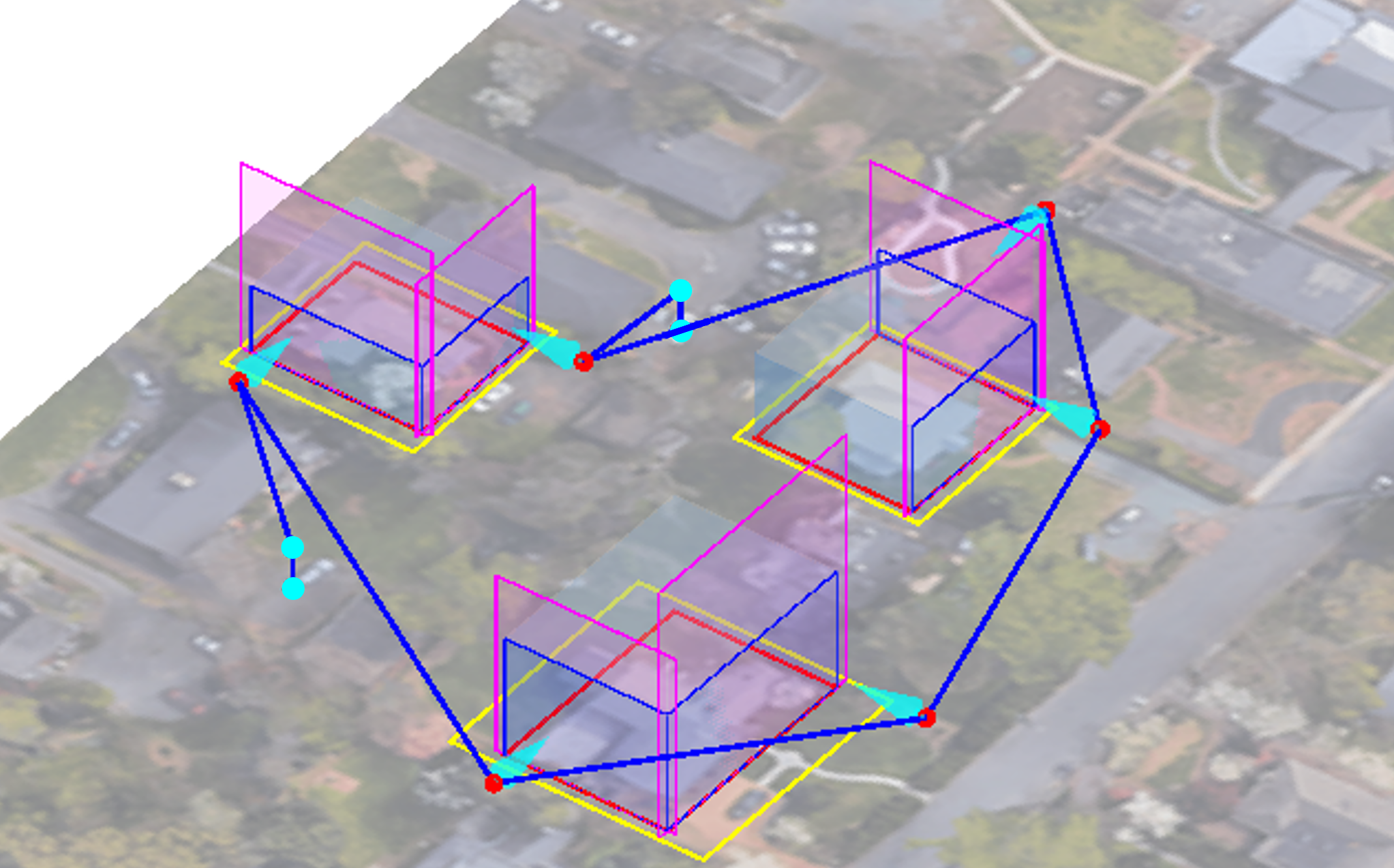
- [May 22, 2025] I will be presenting our paper Sampling-Based Planning for Autonomous Photography at the Active Perception session, ICRA 2025 in Atlanta. Come hang out and say hi!
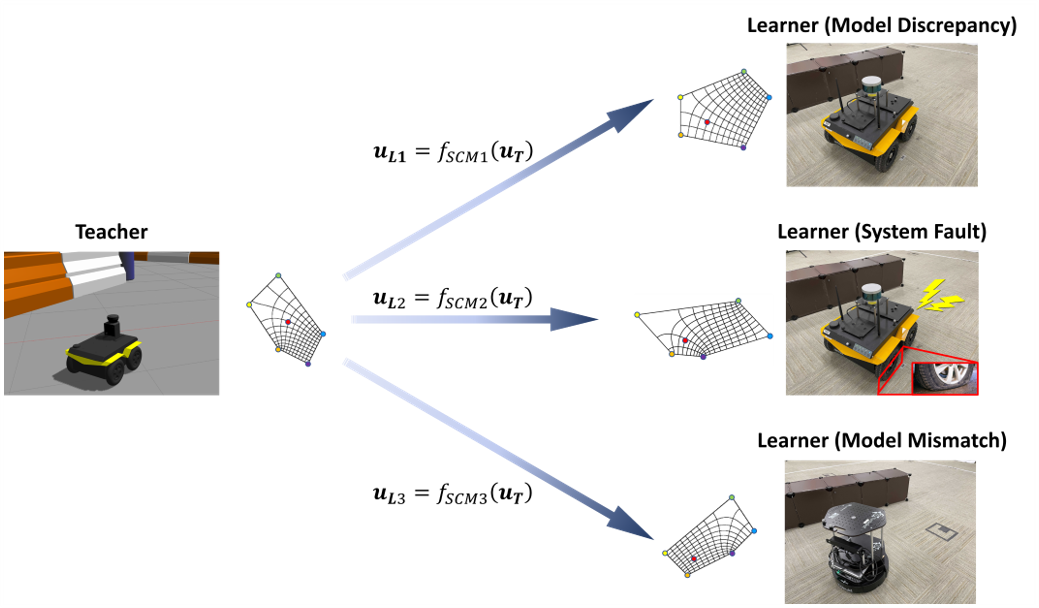
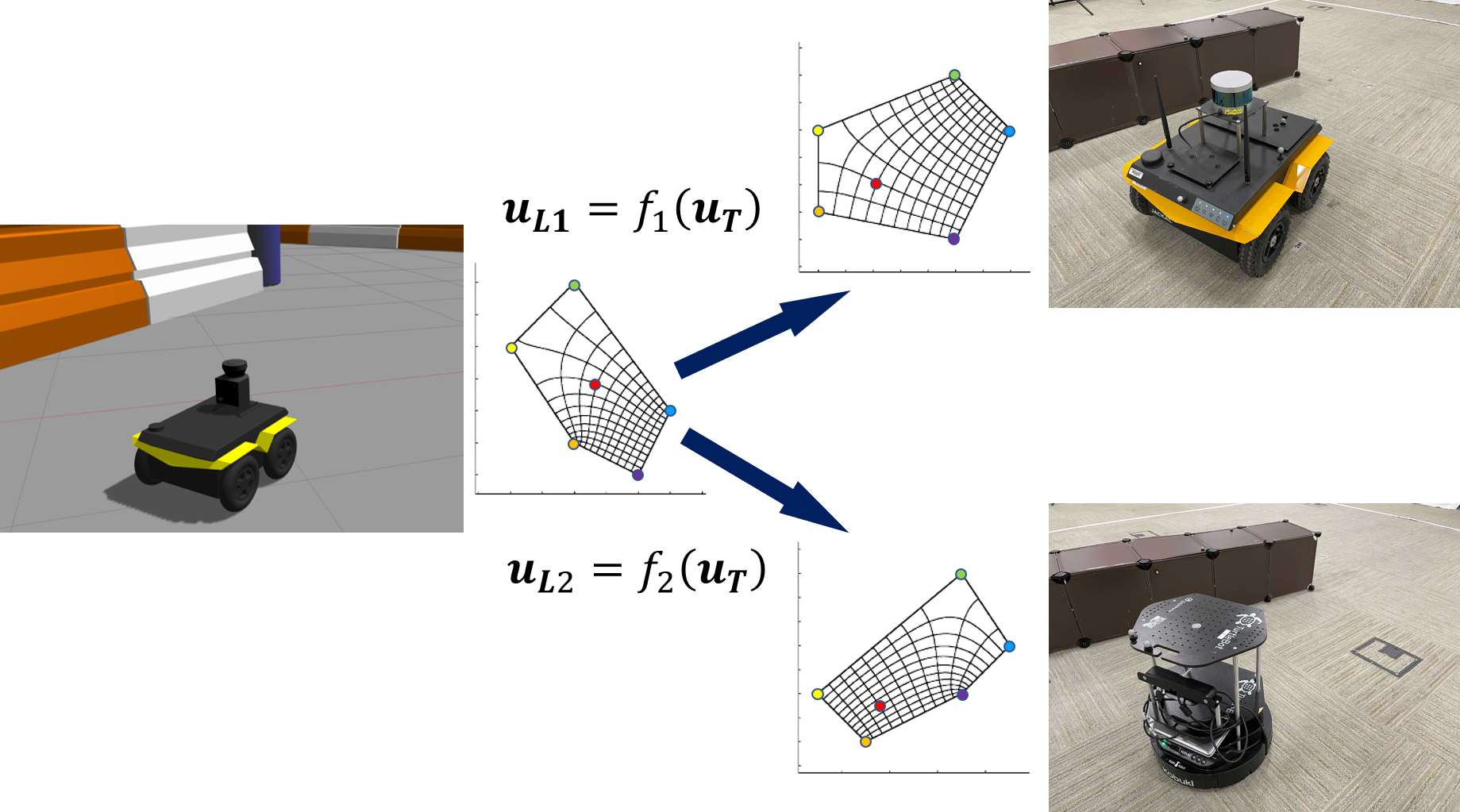
- [Mar 20, 2025] Our recent paper "A Schwarz-Christoffel Mapping-based Framework for Sim-to-Real Transfer in Autonomous Robot Operations" has been accepted to the Journal of Intelligent & Robotic Systems (JINT).
- [Jan 27, 2025] Our recent paper about Sampling-Based Planning for Autonomous Photography has been accepted to ICRA and will be presented during ICRA25 in Atlanta, USA on May 19 - May 23 2025.
- [Aug 14, 2024] I moved from VA to CA and started my new role at DiDi Research America working on planning and control for L4 autonomous driving.
- [May 28, 2024] I successfully defended my PhD thesis "Transfer Learning Methods for Prediction, Replanning, and Adaptations of Autonomous Mobile Robots under Degraded Conditions".
- Show more
- [Sept. 1, 2023] Our recent paper about Next-Best-View-based Task and Motion Planning has been accepted to IROS23-TAMP Workshop and will be presented in Detroit, IL, USA on Oct. 1st - Oct. 5th, 2023.
- [May 21, 2023] I earned my Master's en Passant to my doctorate.
- [Jan. 27, 2023] I passed my dissertation proposal to enter PhD Candidacy.
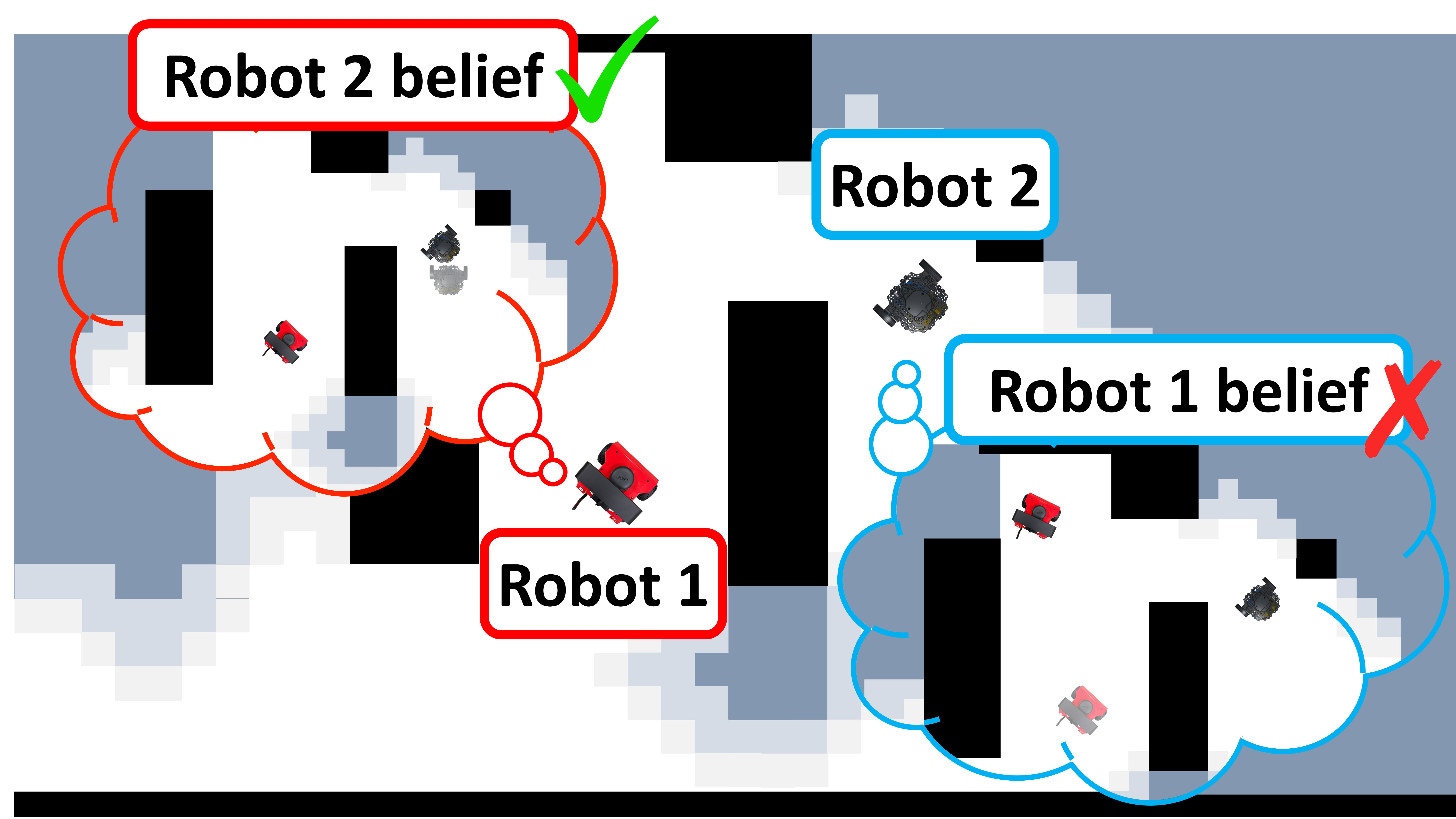
- [Jan. 16, 2023] Our recent paper about epistemic path planning with limited communication has been accepted to ICRA23 and will be presented in London, UK on May. 29th - June 2nd, 2023.
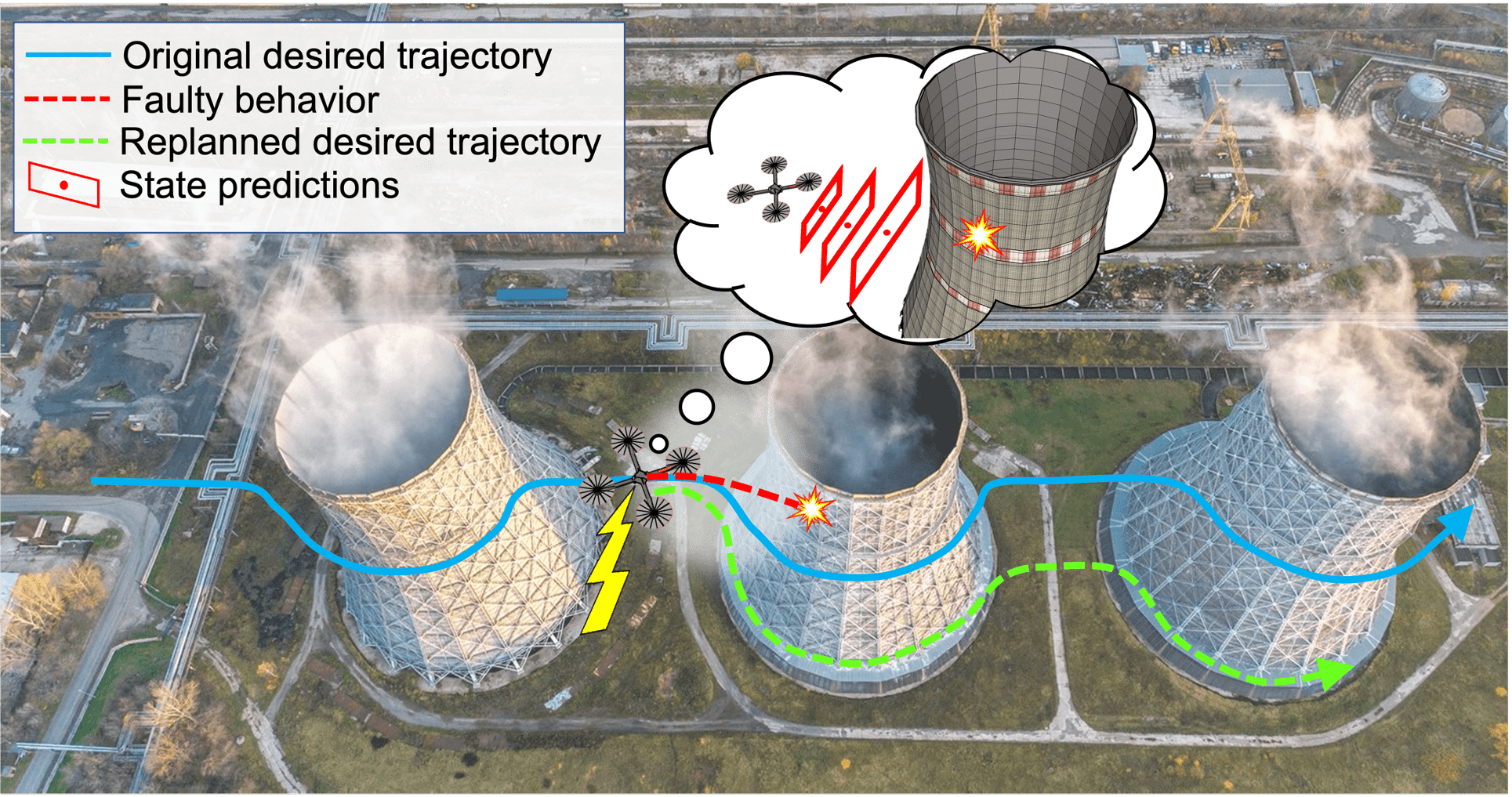
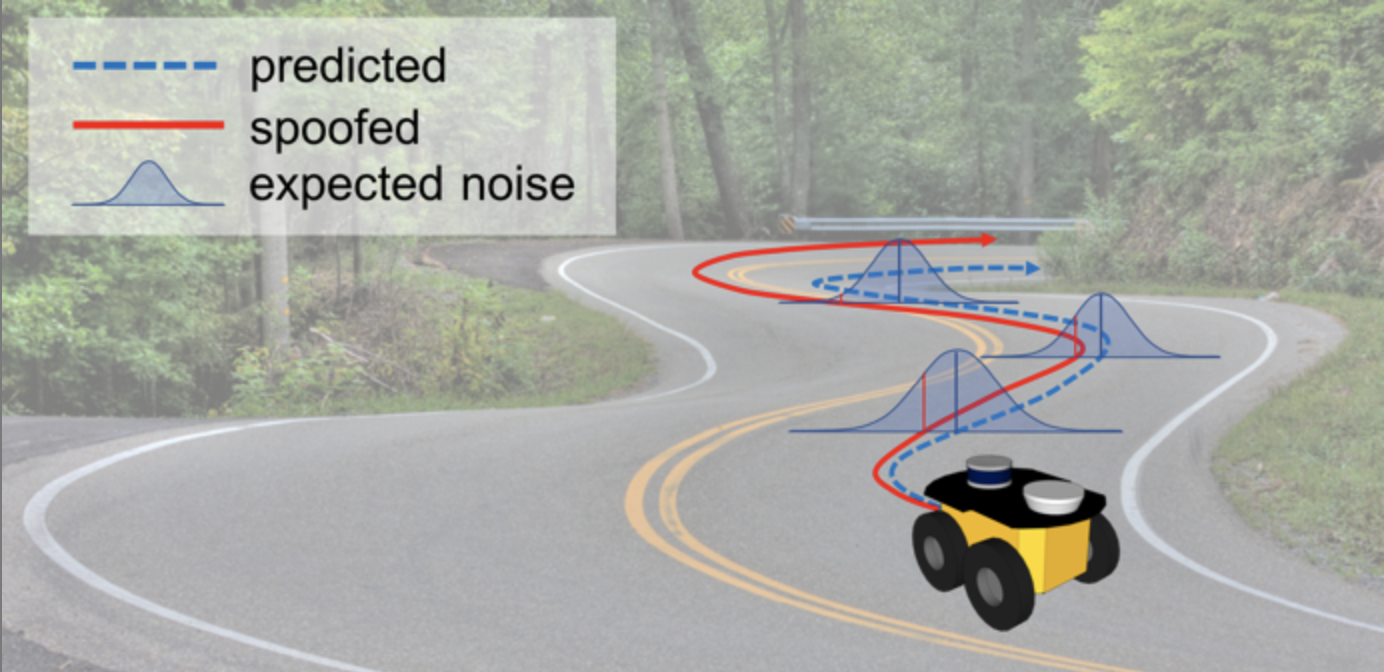
- [June 30, 2022] Our recent paper about Meta-Learning-based proactive planning has been accepted to RA-L and will be presented during IROS22 in Kyoto, JP on Oct. 23rd - Oct. 27th, 2022.
- [Apr. 25, 2022] I will present our lab in the UVA Engineering Open House.
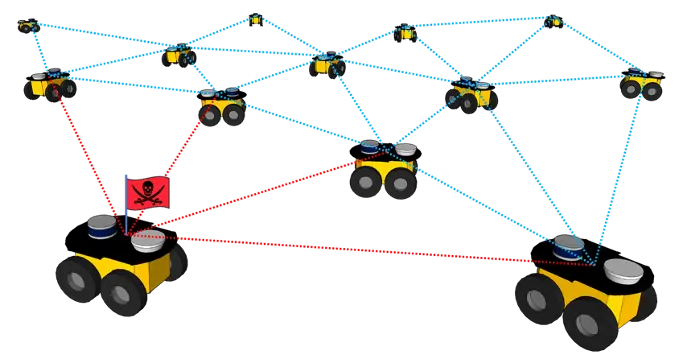
- [Jan. 20, 2022] Our recent paper about resilient robotic swarms has been accepted to T-RO.
- [Nov. 17, 2021]I co-organized the 6th UVA Annaual AMR competition. The highly anticipated return of the in-person competition is featured in UAV Today.
- [Apr. 1, 2021] We are featured in UVA Today, welcoming Boston Dynamics Spot. My labmate and I developed Spot python ROS wrapper using BD Spot SDK for lab needs.
- [Nov. 19, 2020] As one of two graduate teaching assistants for the Autonomous Mobile Robots class, I co-led the shift of lab sessions from physical robots to online simulationsc. The graduate-level class, hosting over 40 students from four departments, is recognized in UVA Today for its success and broad appeal amid COVID-19 pandemic.
- [Feb. 27, 2019] We are featured in UVA Today for using our autonomous robot to 3D Map the University Hall before its demolition.
-
 JINT
JINT
Shijie Gao, Nicola Bezzo
Journal of Intelligent & Robotic Systems
-
 ICRA 25
ICRA 25
Shijie Gao, Lauren Bramblett, Nicola Bezzo
IEEE International Conference on Robotics and Automation (ICRA), 2025
-
 IROS 23
IROS 23
TAMP
Shijie Gao, Lauren Bramblett, Nicola Bezzo
IEEE/RSJ International Conference on Intelligent Robots and Systems - Task and Motion Planning Workshop (IROS TAMP), 2023
-
 ICRA 23
ICRA 23
Lauren Bramblett, Shijie Gao, Nicola Bezzo
IEEE International Conference on Robotics and Automation (ICRA), 2023
-
 RA-L
RA-L
Shijie Gao, Esen Yel, Nicola Bezzo
IEEE Robotics and Automation Letters (RA-L)
-
 T-RO
T-RO
Paul J Bonczek, Rahul Peddi, Shijie Gao, Nicola Bezzo
IEEE Transactions on Robotics (T-RO)
-
 IROS 21
IROS 21
Shijie Gao, Nicola Bezzo
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021
-
 SIEDS 21
SIEDS 21
Grace Glaubit, Katie Kleeman, Noelle Law, Jeremiah Thomas, Shijie Gao, Rahul Peddi, Esen Yel, Nicola Bezzo
Systems and Information Engineering Design Symposium (SIEDS), 2021
-
 IROS 20
IROS 20
Rahul Peddi, Carmelo Di Franco, Shijie Gao, Nicola Bezzo
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020
-
 ACC 20
ACC 20
Paul J Bonczek, Shijie Gao, Nicola Bezzo
American Control Conference (ACC), 2020
-
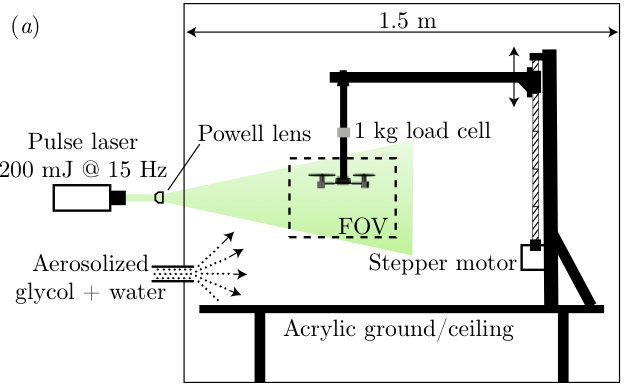 APS 19
APS 19
Darius Carter, Megan Mazzatenta, Shijie Gao, Carmelo Di Franco, Nicola Bezzo, Daniel Quinn, Link Lab Collaboration
APS Division of Fluid Dynamics (Fall), 2019
-
 ICUAS 19
ICUAS 19
Shijie Gao, Carmelo Di Franco, Darius Carter, Daniel Quinn, Nicola Bezzo
International Conference on Unmanned Aircraft Systems (ICUAS), 2019
Teaching
-
Graduate Teaching Assistant, Autonomous Mobile Robots (AMR), 19', 20', 21', 22', 23'
-
Capstone Mentor, ECE Undergraduate Student Capstone 19', 20', 21'
Services
Conference Reviewers
- American Control Conference (ACC)
- IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
- IEEE International Conference on Robotics and Automation (ICRA)
- Mediterranean Conference on Control and Automation (MED)
Journal Reviewers
- IEEE Transactions on Robotics (T-RO)
- IEEE Robotics and Automation Letters (RA-L)
- Journal of Intelligent & Robotic Systems (JINT)
- IEEE Transactions on Cognitive and Developmental Systems (TCDS)
- Scientific Reports
Contact
Address: 61 Daggett Dr, San Jose, CA 95134
Office Location: DiDi Research America, LLC
Email: sjgao@virginia.edu
Last Update: